
這是一個在Youtube上非常棒的頻道,對於想要學習Maya Rigging的人來說絕對不可錯過!
就是---------- antCGI !!
裡面有非常詳細的從無到有Rig角色的影片,解說淺顯易懂,圖文豐富,想要學習Rigging卻不知從何下手的人非常推薦!!!
-----------------------------------------------------------------------------------------------------------------------------
【如果想知道如何使用Advanced Skeleton Body Rig可以看這篇!】
【如果想知道如何使用Advanced Skeleton Facial Rig可以看這篇!】
-----------------------------------------------------------------------------------------------------------------------------
以下是看完了Fundamentals Part1~Part7的筆記!!
個人覺得有幾點非常值得記錄下來:
- Rotate Order原理
- Joint Orient Tool用法
- 反轉Joints階層
- Symmetry Joints工具
- Joint Rotate Axis與Transform不同步時解法
- IK Arm完整的製作
- IK Leg+Reverse Foot完整製作
- Control Tag功能
- Combine Curve
Rotate Order原理


Joint Orient Tool用法


反轉Joints階層

Symmetry Joints工具

Joint Rotate Axis與Transform不同步時解法
有時候我們會發現joint旋轉的軸向跟位移軸向不一致,這可能會導致之後再調動作出現問題,至於為什麼會發生這種事,是因為我們可能在製作過程中不小心動到了什麼,總之是個滿常會遇到的狀況!
如下圖,我們可以發現在Joint Attribute面板裡面的 Rotate Axis並沒有歸零!! 按照預設應該是不能有任何數值的!!

解法很簡單!! 只要在MEL欄位輸入 joint -e -zso就可以將其歸零了!! 軸向瞬間恢復正常!

IK Arm完整的製作


接著我們簡單做一個控制器,軸向要跟手腕一致,暫且不要將他constraint到任何joint上。
然後我們把IK Handle丟進這個控制器,現在我們就可以透過控制器移動整隻手臂了,接著再使用控制器 Orient Constraint Wrist Joint,就可以得到旋轉效果!!!

手臂完成之後,我們需要再幫手肘也加上控制器,這樣能讓整個Rig有更多的自由度!
一樣確認這個控制器軸向跟手肘joint一致,然後選擇它 pole vector constraint到IK Handle上!!
現在我們不只可以控制手腕的位置,也可以控制手肘指向的位置!!!
到此整個IK手臂就算是完成了!!!

IK Leg+Reverse Foot完整製作
IK Leg製作方式就跟Arm差不多,但是多了一個Reverse Foot的手續,有點複雜!!
首先一樣照著IK ARM的製作方式做了IK leg以及Pole Vector Constraint!

接著從Ankle的部分複製出一組Joint。 這組就當我們的Reverse Foot Joint。
接著複製一個新的ToesEnd當作腳踝,移動到腳踝位置,然後把它parent回去ToesEnd,接著再Reverse 整個階層,現在我們就可以靠著這個Reverse Foot做出類似腳掌前凹、墊腳的各種動作了!

接下來我們把Reverse Joint移動到Ankle 控制器底下!

然後,我們回到IK Leg Joint這邊,從Ankle開始到Toes End加上兩個IK Handle,這邊要注意的是Current Solver 那邊要選擇Single Chain Solver,然後Ankle到Toes,Toes到ToesEnd總共做兩次!
接著把這兩個IK Handle丟回相對應位置的Reverse Joint那邊!
然後我們現在移動IK Ankle控制器就可以發現已經可以做出腳掌往下垂的動作了!

在進入最後階段之前,我們還要做一件事,就是把原本IK Leg的Handle丟到Reverse Ankle Joint底下,這樣一來我們只要旋轉Rever Joint就可以做出各種額外的動作!

現在我們需要在Reverse Joint上面創建兩個Group,是為了做出腳踝內翻、外翻的效果!

接著我們移動這兩個Group的軸心,先按D,然後就可以調整他們的軸心位置,一個移到腳踝外側,一個移動到內側,現在旋轉Group就可以做出內外翻的感覺了!

再回到剛剛在IK Ankle Joint上做的兩個Ik Handle,我們把ToesEnd這個Group起來,然後移動軸心到Toes的位置上,這樣就可以透過Group來做處腳掌彎取的動作!

最後一步,我們要將剛剛在Reverse Joint上的東西透過數值串聯起來,讓Animator可以透過他們去控制這些東西!!
首先,先在IK Ankle 控制器上新增Attribute! 使用Float,但不用限定最大跟最小值!

首先,先Connect Heel Twist到IK_Reverse_ToedENd_L上,這就可以做出以腳踝為中心旋轉的動作!

接下來是Toe Twist connect到IK_Reverse_ToedENd_L上!

最後把Toe Tap connect到IK_Reverse_Toe_Tip這個Group上就完成了!

當然,還有腳踝內翻外翻的部分! 這邊要使用的是Node Editor 的condition 節點!
串法並不複雜,只是要熟悉哪邊接到哪邊! 要注意的地方是Input一個是If True R另一個是If False G,output也一樣。

那麼,最後真的來到最後一個步驟就可以完成IK LEG的製作了!
我們還要在控制器上加上一個Roll的數值!!!
這次我們要設定最大跟最小值,給它正十負十!
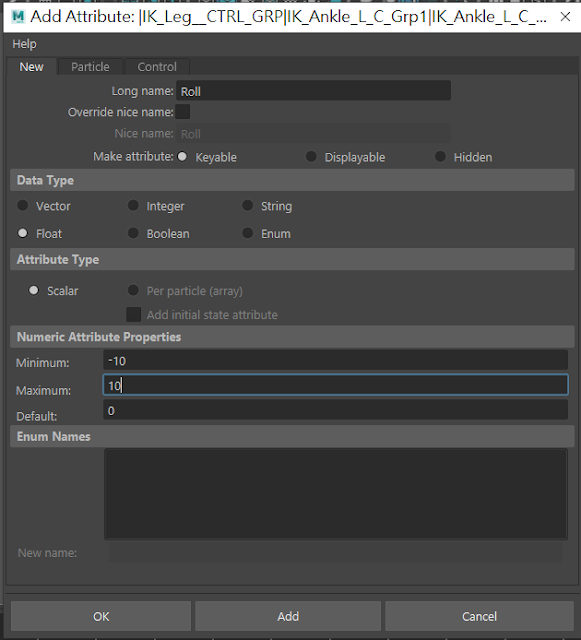
接著使用Driven key來驅動這三根Joint。

首先,新增Roll到IK Ankle控制器上,然後使用它作為Driven key的Driver。
這邊的Joint最後一個跟其他的軸向都不一樣,是過程中沒有檢查到.....所以在做Driven key時才需要Z軸Y軸切換,正常情況應該只要動Z軸就好了.....

再把腳踝後弓的加上去就真的完成了!!!
至此,就是一個基本的IK LEG完整流程!!!

Control Tag功能
這是一個滿特別的功能,可以讓控制器在滑鼠範圍內才出現,還有一個是可以透過Parent功能直接用方向鍵選取上層的控制器(一班來說控制器上層都會是Group)!

Combine Curve
最後介紹的是Combine curve的用法,有時候我們會想要自己做控制器,進而結合很多curve線,這時就會用到一些指令了!
假設現在我們要將下圖兩個curve合而為一!

先到outliner打開SHAPE,然後選擇其中一個curve線的shape,接著選另一個的group,然後執行 MEL : parent -s -r
就完成了!!!! 現在兩個curve已經合體完畢。

如果覺得這篇文章有幫助你在動畫之路走得更長遠,可以使用 Google 或 Facebook 帳號快速登入,按Like五下,就可以幫助我從Likecoin得到回饋,完全不用任何費用!
一點點的鼓勵都會成為我寫作的動力,感激不盡!








0 留言